
Maytech VESC7.12 Supercase 200A based on VESC75 for Electric Skateboard Longboard Robotics SUPER ESC with Cooling Fan and UBEC
- Category: >>>
- Supplier: MayRC Industrial Co. Ltd.
Share on (1600051187394):
Product Overview
Description
Related Products
Products Description

Maytech VESC7.12 Supercase 200A based on VESC75 for Electric Skateboard Longboard Robotics SUPER ESC with Cooling Fan and UBEC
Model no | MTSPF7.12K 200A SUPERFOC ESC with Fan and UBEC | Current | 200A | ||
Voltage | 5-18S Max 75V (If don't use brake, max voltage 75V, if use brake, max voltage is 50V. ) | Set current in VESC_TOOL | Motor Current Max: ≤200A (According to your motor current); Absolute Maximum Current: ≤250A (According to your motor current); Battery Current Max: ≤100A (According to your battery discharge current). | ||
BEC | 5V | With | 20W cooling fan and UBEC | ||
Hardware | based on V75300 | Firmware version | updatable, VESC_TOOl Compatible | ||
Weight | 345g | Aluminium Case | 98.5*56*35mm | ||
Feature | 12pcs Fairchild mosfets; 8-layer PCB; Separate high current components and low-curent components to two PCBs. | ||||
Application | electric skateboard longboard, fighting robot, e-bike, electric surfboard, etc | ||||
Application:
Electric skateboard, Esk8, longboard, mountainboard, offroad skateboard, city skateboard, street skateboard, motorized skateboard, electric longboard, electric surfboard, Esurf, Efoil, electric foil, foilsurf, foilsurfing, surffoil, surfjet, jetski, jetboard, electric hydrofoil, etc.,, ROV/ROVEEE/remote operated vehicle, underwater robot, Underwater Robotics, underwater remotely operated vehicles, subsea robots, cablecam, Ultra drones, security monitoring robots, robots for security and safety monitoring in harsh terrain, agile robots, autonomous agile robots, security robots, autonomously monitor security, combat robots, fighting robots, etc.,
Freatures:
-High voltage: If use current mode, without brake, max voltage is 75V; If use current mode with brake or duty cycle mode,maxvoltage is 12S lipo (Max 50.4V).
-High current: 200A
-Compatible with brushed and brushless motors, intrunner and outrunner motors
-Sensored or Sensorless operation + Hybrid mode
-Adjustable Forward/Backward/Brake
-Regenerative Braking Function
-Configurable RPM, Current, Voltage and Power limits
-Support PPM, Analog (ADC), UART, Canbus input
-Support BLDC square wave mode control and FOC sine wave mode
-Communication ports: USB, CAN, UART
-Throttle curve and ramping for all input sources
-Seamless 4-quadrant operation
-Motor Revolution, Amp Hour, Watt Hour counting
-Real time data analysis and read out via communication ports
-Adjustable protection against:
Max and Minimum Input(Battery) Voltage
Max Motor Current and Input(Battery) Current limits
Max ERPM(RPM) (separate limits for each direction)
Max Power (Wattage)
Max Motor and ESC Temperature
Max Regenerative Braking Current (separate limits for the motor and the input)
Port definations:
1. USB port for programming;
2. LED Port for connecting customer’s LED light to show ESC is on or off;
3. Sensor port for motor Hall sensors (ABI, HALL, magnetic precision encoders);
4. CAN Port for CAN communication with other devices and VESC arrays;
5. COMM port for various kinds of other communication methods like I2C, ADC, Uart,You can use your Arduino or Raspberry Pi to control the VESC!
6. PPM port to connect PPM transceivers.

Main Components and Advantages
* High voltage 18S, High curent 200A, tiny size and compact design, light weight.
* Superior Safety: With over-current protection, over-voltage protection, over-heat protection.
* 2pcs PCBs to separatehigh and low power components (more stable and reliable).
* 8-layer 3oz PCB Board, 3.4mm thick, supports high current and has efficient heat-dissipation capability. (Other brand PCB is only 1-2mm thick).
* 12pcs quality Mosfets, greater efficiency, handle higher current.
* ARM 32bit processor, faster data transfer and storage.
* 3pcs Capacitors 63V 820μf, prevent power circuit impact.
* 3pcs Current sampling chips. It can make the current sampling faster and more accurate, and has a good improvement on the FOC and over-current protection functions.
* 6061 Premium Alu-Alloy Case,Quick heat-dissipation, Sleek aluminum finish, comfortable hand-feeling.
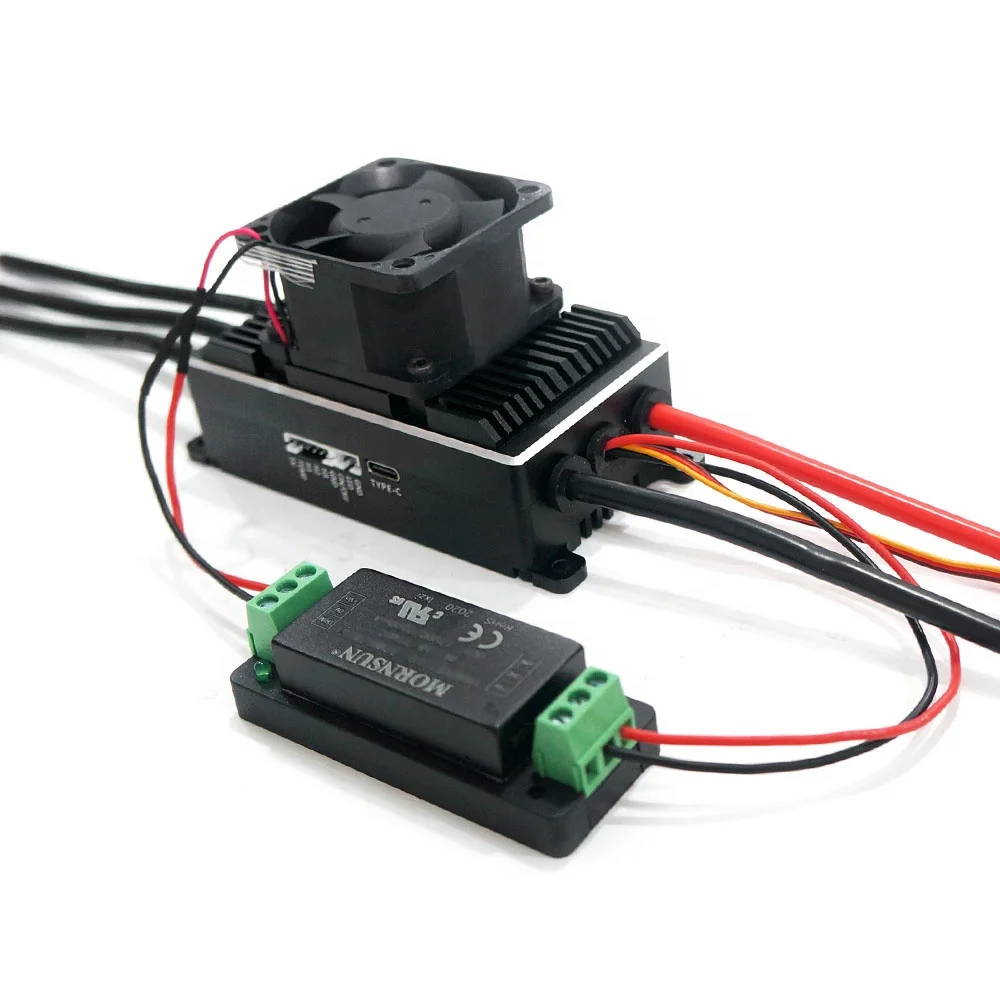
* Removable cooling fan, 20W high power for quick cooling.Ensure reliable performance with excellent temperature control technology. (Notice: Fan and DC-DC module are not assembled. Please buy separately.)
* USB Type C port- easy to connect and program settings.
* Firmware standard: VESCTOOL automatically recognizes this ESC as 7.5_300. This firmware can be used.
* High voltage 18S, High curent 200A, tiny size and compact design, light weight.
* Superior Safety: With over-current protection, over-voltage protection, over-heat protection.
* 2pcs PCBs to separatehigh and low power components (more stable and reliable).
* 8-layer 3oz PCB Board, 3.4mm thick, supports high current and has efficient heat-dissipation capability. (Other brand PCB is only 1-2mm thick).
* 12pcs quality Mosfets, greater efficiency, handle higher current.
* ARM 32bit processor, faster data transfer and storage.
* 3pcs Capacitors 63V 820μf, prevent power circuit impact.
* 3pcs Current sampling chips. It can make the current sampling faster and more accurate, and has a good improvement on the FOC and over-current protection functions.
* 6061 Premium Alu-Alloy Case,Quick heat-dissipation, Sleek aluminum finish, comfortable hand-feeling.
* Removable cooling fan, 20W high power for quick cooling.Ensure reliable performance with excellent temperature control technology. (Notice: Fan and DC-DC module are not assembled. Please buy separately.)
* USB Type C port- easy to connect and program settings.
* Firmware standard: VESCTOOL automatically recognizes this ESC as 7.5_300. This firmware can be used.

Production
Exhibition

Certifications

Packing & FAQ



We Recommend







New Arrivals
New products from manufacturers at wholesale prices