

Digital Deream DDCS V3.1 3/4 Axis As Fanuc Cnc Controllers Kit With MPG Handwheel for CNC Engraving And Milling Machines
- Category: >>>
- Supplier: Shenzhen Digital Dream Numerical Technology Co. Ltd.
Share on (1600513124233):
Product Overview
Description
Professional original CNC controller manufacturer and has a warehouse in the USA
Products Description
The DDCS V3.1 is a standalone CNC motion controller without the need of a computer, for stepper and servo systems. DDCS V3.1 Brief technical features as following:
1) 16 photoelectric isolated digital inputs, 3 photoelectric isolated digital outputs;
2) 3.1 Version enhanced Algorithm, support soft interpolation, fixed arc interpolation bug of the old version;
3) Analog spindle control 0-10V spindle control (can be modified as PWM output);
4) 3-4 axis motor Control. Differential Pulse and direction output signal, Max. 500Khz per axis;
5) ARM9 main control chip, FPGA core algorithm chip;
2) 3.1 Version enhanced Algorithm, support soft interpolation, fixed arc interpolation bug of the old version;
3) Analog spindle control 0-10V spindle control (can be modified as PWM output);
4) 3-4 axis motor Control. Differential Pulse and direction output signal, Max. 500Khz per axis;
5) ARM9 main control chip, FPGA core algorithm chip;
6) 1GB memory inside;
7) 5 inches TFT screen, resolution ratio: 480x272px, 17 operation keys;
7) 5 inches TFT screen, resolution ratio: 480x272px, 17 operation keys;
8) The Power Supply for the controller is 24VDC, minimum Current is 0.5A;
9) The Power Supply for IO Port is 24VDC, minimum current is 0.5A; By the IO power supply, system already supply the power for IO ports. So no need the external power supply for IO port anymore;
10) USB flash disk support for G code file input, no size limited of the G-code file ;
11) Support standard MPG;
12) Jog function for each axis (continuous, step, defined distance); Customer can define the distance;
13) Support the operation of quickly specify the running position;
14) Support for “Power Cut” recovery. Data is automatically saved;
15) Backlash compensation, Tool compensation;
16) The controller only support NPN type limited switch;
9) The Power Supply for IO Port is 24VDC, minimum current is 0.5A; By the IO power supply, system already supply the power for IO ports. So no need the external power supply for IO port anymore;
10) USB flash disk support for G code file input, no size limited of the G-code file ;
11) Support standard MPG;
12) Jog function for each axis (continuous, step, defined distance); Customer can define the distance;
13) Support the operation of quickly specify the running position;
14) Support for “Power Cut” recovery. Data is automatically saved;
15) Backlash compensation, Tool compensation;
16) The controller only support NPN type limited switch;
17)Control System Unit is compatible with Metric Units and Imperial Units;
18)MPG and extended Keyboard can also control and edit the controller system;
18)MPG and extended Keyboard can also control and edit the controller system;
19)Add new function of “Try cutting” (hand-wheel guiding) and “Single-stage processing mode” ;
20) 3 kinds Probing Modes: Fixed Position of tool sensor, Floating Position of the tool sensor, Rectangular block Sensor;
21)Enhanced the software, added a lot of parameters, Optimal Design and algorithm, makes the new version more strong functions and steady;
22) The Option Language of the system is Chinese/English/Russian.
23) Version 3.1 cited the new circuit design and metal box,which can avoid the noise a lot.
23) Version 3.1 cited the new circuit design and metal box,which can avoid the noise a lot.
Brand: | Digital Dream | Warranty: | 1Year | ||
Model: | DDCS V3.1 | Axis Optional: | 3Axis / 4Axis | ||
MOQ: | 1pc | Stock: | Rich | ||
1Package Includes: | 1 x DDCSV3.1 CNC offline controller (3/4 axis optional) 1 x 3 layer wiring terminal for main port 1 x 4GB USB flash drive and USB extension cable 29cm 1 x DB-15 Male plug for MPG connection 1 x star/pause/stop/com terminal 1 x other small accessories | ||||

Pictures/ Machines shared by customers





The DDCS V3.1 is a small box that can fit in a window of a small control box or control cabinet. Four locking hooks fix this controller from the frame. 5" TFT screen and 17Button Keys, DDCS V3.1 dimensions:

Wiring section:
Includes: Input Ports, Spindle&Output Ports, stepper/Servo control step and direction output, MPG Port, USB Port and power supply Port.

Power supply explanation
In general, the power supply of industrial control’s equipment products are complex. They have many different ground levels. The internal power structure of this product is as following picture.
The Controller need two power supplies, Main power is for system, IO Power is for IO ports. The Main Power input and USB stick and Stepper/Servo Control module share the same ground. IO Power, MPG Port, Spindle PWM, 12 Inputs and 3 Outputs share same ground, between them which is optical isolation. As for the spindle port, take the output ground for
references and the 0-10V adjustable voltages to adjust the spindle speed (refer to spindle VFD manual). The M3/M8/M10 digital output ports pull to ground.
references and the 0-10V adjustable voltages to adjust the spindle speed (refer to spindle VFD manual). The M3/M8/M10 digital output ports pull to ground.

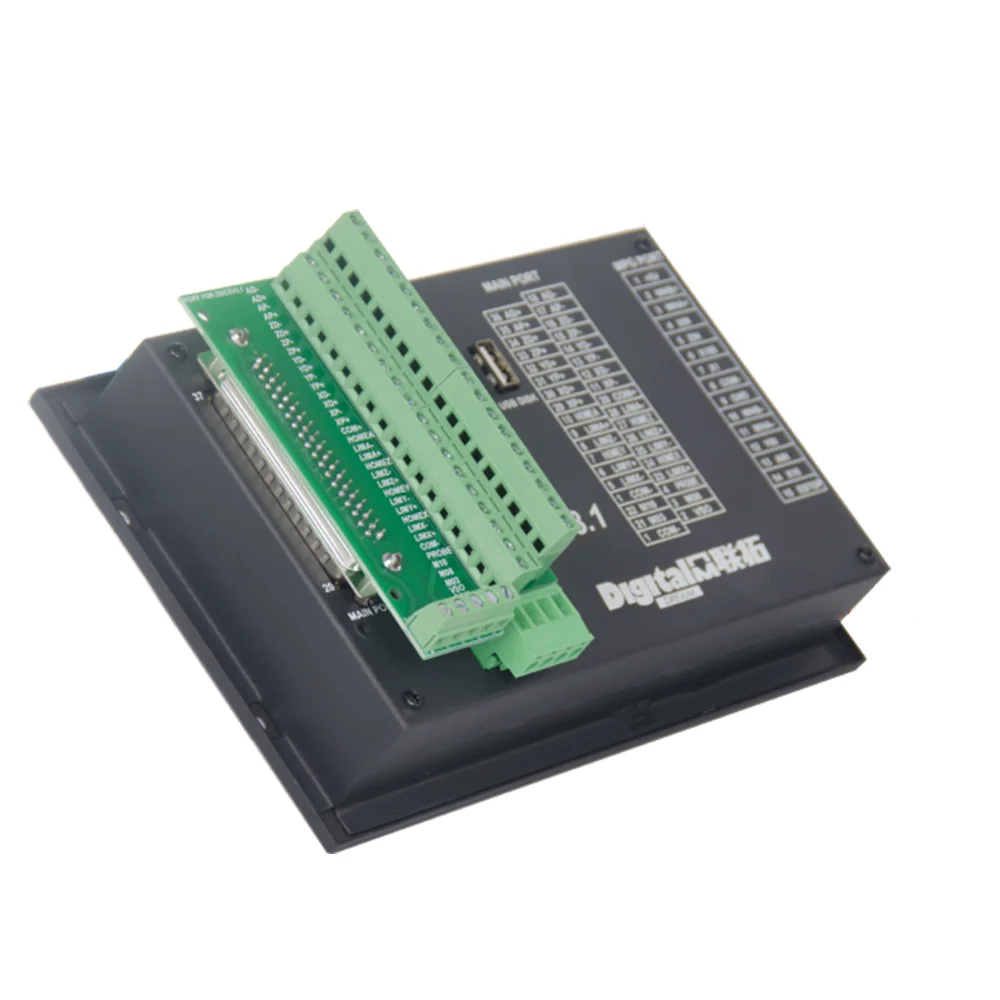
3 layer wiring terminal for main port
We supply a wiring terminal to fit the 37 pin female connector of the main port. This simplifies the wiring. At the 4 corners, there are screws to lock the terminal to the controller.
There are 3 rows of connectors on the terminal block. Please see following pictures are shows the pin allocation to each row. It supports the following interfaces:
1) Stepper/Servo Output Ports;
2) The Spindle Control Output Ports;
3) The E-stop,Limit,Home and Probe and other Inputs ports;
4) 24V DC Power Supply ports for the Controller;
5) 24V DC Power Supply ports for the I/O Unit.
For the connector to pin mapping please refer below pictures
1) Stepper/Servo Output Ports;
2) The Spindle Control Output Ports;
3) The E-stop,Limit,Home and Probe and other Inputs ports;
4) 24V DC Power Supply ports for the Controller;
5) 24V DC Power Supply ports for the I/O Unit.
For the connector to pin mapping please refer below pictures



More details please check from our Manual, please contact us for getting manual after placed the order.
Company Profile
China Manufacturer----Digital Dream has a 10 years history in the numerical control industry, specializing in the research,
development and production of various CNC (Computer Numerical Control) systems. DigitalDream aims to combine high quality and high reliability with affordability. We produce 1 axis to 6 axes CNC system.
Thank you for choosing digital dream’s motion controllers.
development and production of various CNC (Computer Numerical Control) systems. DigitalDream aims to combine high quality and high reliability with affordability. We produce 1 axis to 6 axes CNC system.
Thank you for choosing digital dream’s motion controllers.
Packaging & Shipping
Packaging----Normally we use the standard exporting packaging. We also can according to clients' request .
Shipping---A. : Normally it takes 3-5 business days worldwide shipping from China by Air/Express(DHL,FedEx,UPS,EMS etc.) without delay.
If you are in the long distance area, it might be a little longer. If your country has special import policy, please contact us in
advance before confirming an order. In that case, we could negotiate a best shipping method for you.
B.: We can arrange shipment by sea. Minimum CBM requirements to be 1 CBM.
C.: .You can inform of us to use your own carrier account No., if it is convenient for you.
Shipping---A. : Normally it takes 3-5 business days worldwide shipping from China by Air/Express(DHL,FedEx,UPS,EMS etc.) without delay.
If you are in the long distance area, it might be a little longer. If your country has special import policy, please contact us in
advance before confirming an order. In that case, we could negotiate a best shipping method for you.
B.: We can arrange shipment by sea. Minimum CBM requirements to be 1 CBM.
C.: .You can inform of us to use your own carrier account No., if it is convenient for you.

Our Service
1.The friendly English Version manual is provided for free.
2. We offer 24 hours technical support on-line or you can send us your specific problem directly by email.
3.Warranty: 1 year limited and professional long-term technical support.
4.Free training to make sure you master the operating of our products.
5. We accept OEM/ODM, but the MOQ of OEM/ODM is 100 sets.
6. MOQ---1 set machine, mixed order is also welcomed.
2. We offer 24 hours technical support on-line or you can send us your specific problem directly by email.
3.Warranty: 1 year limited and professional long-term technical support.
4.Free training to make sure you master the operating of our products.
5. We accept OEM/ODM, but the MOQ of OEM/ODM is 100 sets.
6. MOQ---1 set machine, mixed order is also welcomed.
We Recommend







New Arrivals
New products from manufacturers at wholesale prices