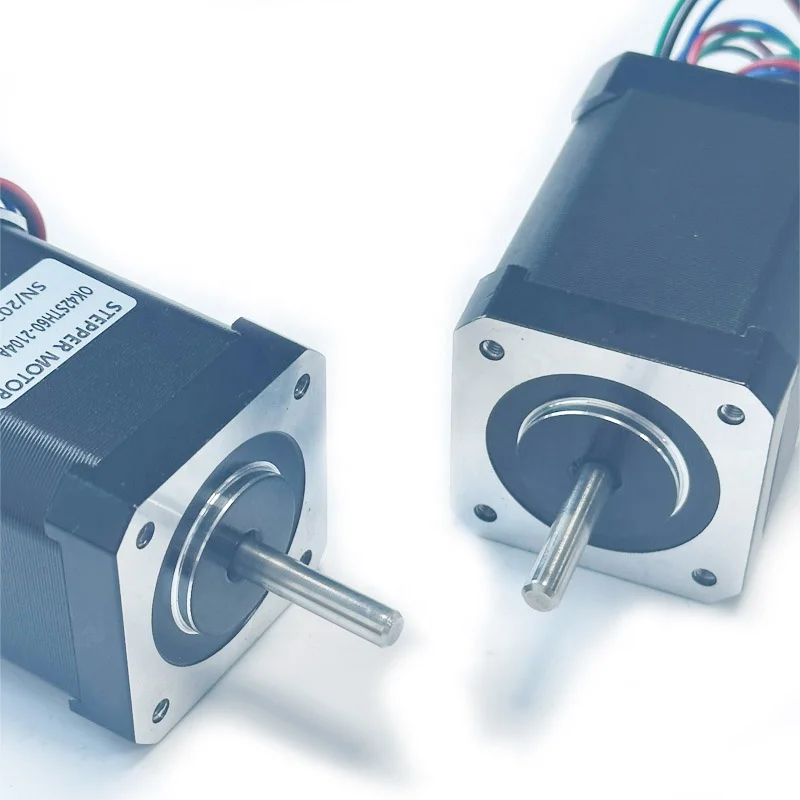
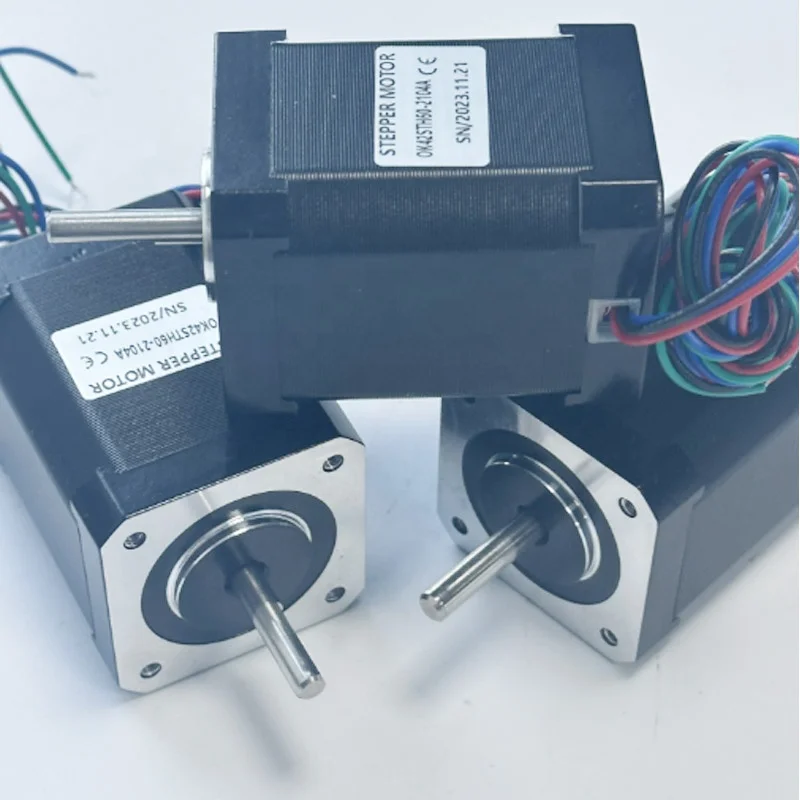



42mm*42mm*60mm cheap dc stepper motor cnc 3d printer stepper encoder stepper motor
- Category: >>>
- Supplier: Suzhou Weipeng Precision Machinery Co. Ltd.
Share on (1601004814109):
Product Overview
Description
Products Description
Stepper motor is a type motor that runs in discrete steps after powering. These motors do not have an encoder inbuilt. But if it is needed it can be added externally.
As the encoder in the stepper motor is not present, the stepper motor is less complex than the servo motor. And as the total pole count is higher, the stepper motor produces higher torque than the servo motor.
The main drawback of stepper motors is that they cannot produce the same torque at high speeds. They miss phases and that is why they are not preferred for applications where high speed is a priority.
Hybrid Servo Motor / Stepper Motors offer high efficiency, low vibration and incorporates our newly developed Mechanical Absolute Encoder for absolute-type positioning without battery back-up or external sensors to buy. Closed loop performance without hunting or gain tuning. Available with a built-in controller or pulse input driver which substantially reduces heat generation from the motor through the use of high-efficiency technology.
Feature
* Battery-Free, Mechanical Absolute Encoder
* Closed Loop Performance, No Hunting or Gain Tuning
* AC Input
* Wide Range of Gear Types for Inertia Matching & Higher Torque
* Electromagnetic Brake Type Available
As the encoder in the stepper motor is not present, the stepper motor is less complex than the servo motor. And as the total pole count is higher, the stepper motor produces higher torque than the servo motor.
The main drawback of stepper motors is that they cannot produce the same torque at high speeds. They miss phases and that is why they are not preferred for applications where high speed is a priority.
Hybrid Servo Motor / Stepper Motors offer high efficiency, low vibration and incorporates our newly developed Mechanical Absolute Encoder for absolute-type positioning without battery back-up or external sensors to buy. Closed loop performance without hunting or gain tuning. Available with a built-in controller or pulse input driver which substantially reduces heat generation from the motor through the use of high-efficiency technology.
Feature
* Battery-Free, Mechanical Absolute Encoder
* Closed Loop Performance, No Hunting or Gain Tuning
* AC Input
* Wide Range of Gear Types for Inertia Matching & Higher Torque
* Electromagnetic Brake Type Available
Feature | Stepper Motors | Servo Motors |
Torque | High speed low torque | High-speed motor torque |
Types of magnet | Stepper motors use conventional magnets | Servo motors use rare earth magnets like Neodymium and Alnico |
Size and weight | Small and lightweight | Large and heavy |
Speed | low to medium speed | low to high speed |
Operating system | open-loop system | closed-loop system |
Power consumption | Less power consumption | High power consumption |
Pole count | High pole count (50-100) | Low pole count (4-12) |
Position control | Low | More |
Response | Fast | Slow |
Product Overview





Product packaging

Customer Photos
We Recommend







New Arrivals
New products from manufacturers at wholesale prices