
PrimoPal Best Sale NEMA 14 High Speed Electric Threaded Linear Stepper Motor Hollow Shaft Encoder
- Category: >>>
- Supplier: Shanghai Primopal Precision Motor Co. Ltd.
Share on (1601210345299):
Product Overview
Description
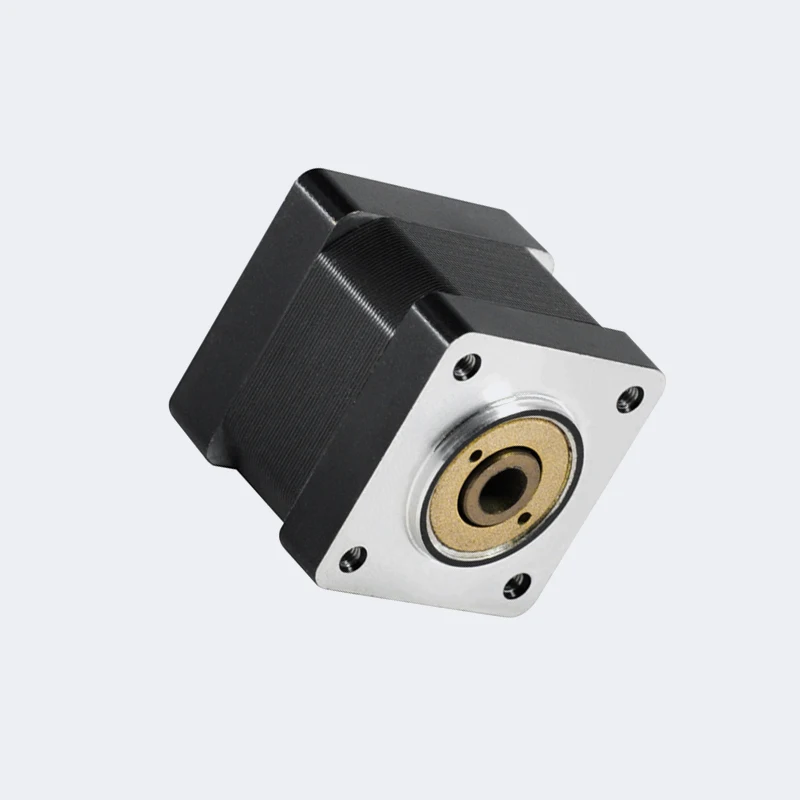
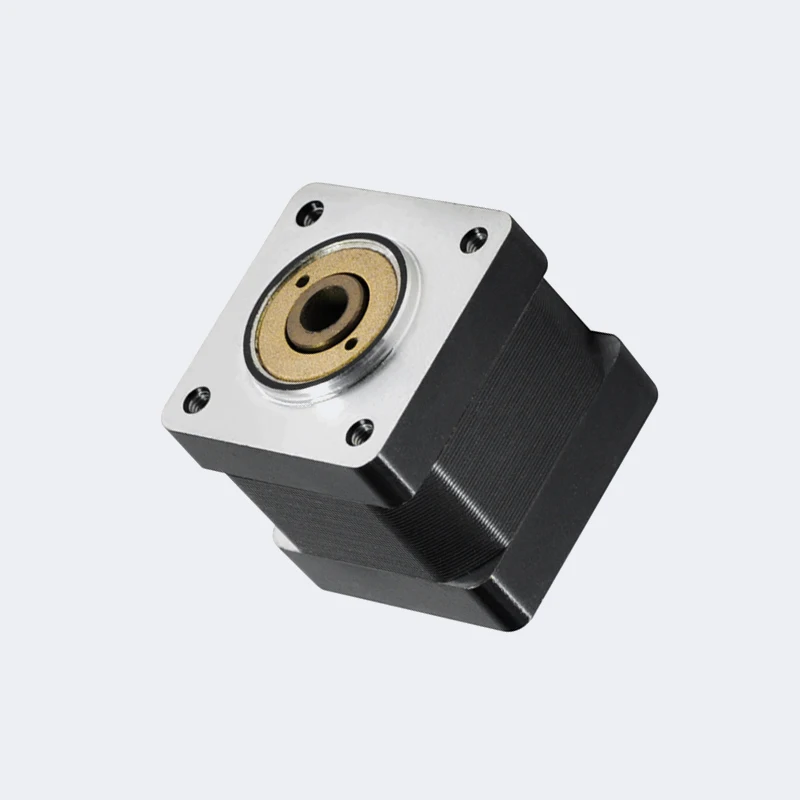
PrimoPal Best Sale NEMA 14 High Speed Electric Threaded Linear Stepper Motor Hollow Shaft Encoder





 FULL RANGE OF STANDARD HOLLOW SHAFT STEPPER MOTORS
FULL RANGE OF STANDARD HOLLOW SHAFT STEPPER MOTORS
| NEMA Size | NEMA8 | NEMA11 | NEMA14 | NEMA17 | NEMA23 | NEMA24 | NEMA34 |
| Model | PHH20Y | PHH28Y | PHB35Y | PHH42Y | PHH57S | PHH60S | PHH86S |


FULL RANGE OF STANDARD HOLLOW SHAFT STEPPER MOTORS
| NEMA Size | NEMA8 | NEMA11 | NEMA14 | NEMA17 | NEMA23 | NEMA24 | NEMA34 |
| Model | PHH20Y | PHH28Y | PHB35Y | PHH42Y | PHH57S | PHH60S | PHH86S |






About Stepper Motors
Stepper Motors provide precise position and speed control, without the need for feedback devices to sense position. The operation of stepper motors is controlled through electrical pulses that the drive converts to current flowing through the windings of the motor. As the current is switched the motor rotates in precise steps of a fixed angle. The motor and drive constitutes a low cost control system that is precise and simple to construct.
Performance Features of PrimoPal' Stepping Motors
| Accurate Position Control | The number of control pulses defines the motor shaft position. Position error is very small (less than1/10th of a degree), and non cumulative. |
| Precise Motor Speed | Step motor running speed, is exactly determined by the frequency of the control pulses. Because the speed is very precise and easy to control, step motors are often used where coordinated motion control is needed. |
| Forward & Reverse, Pause and Holding Function | Motor torque and position control is effective throughout the entire speed range, including zero speed holding torque. The zero speed holding torque locks the shaft at the desired position to hold the load in place. |
| Low Speed Operation | Step motors produce a large amount of torque, and are easy to control, at low speeds. This often eliminates the need for speed reduction gearboxes, reduces costs and saves space. |
| Long Life | The brushless design of step motors leads to motors with a very long life. Step motor life is usually determined by the life of the bearings. |
Normal Selection Steps
You can follow the following steps to choose a stepping motor.
| 1. Determining the Drive Mechanism Component | Determine the mechanism and required specifications. First, determine certain features of the design, such as mechanism, rough dimensions, distances moved, and positioning period. |
| 2. Calculate the Required Resolution | Find the resolution the motor requires. From the required resolution, determine whether a motor only or a geared motor is to be used. The resolution and positioning accuracy of a stepping motor system is affected by several factors the stepping angle, the selected drive mode (full-step, half-step or micro stepping), and the gear rate. |
| 3. Determine the Operating Pattern | Determine the operating pattern that fulfills the required specifications. Find the acceleration (deceleration) period and operating pulse speed in order to calculate the acceleration torque. |
| 4. Calculate the Required Torque | Calculate the load torque and acceleration torque and find the required torque demanded by the motor. |

We Recommend






New Arrivals
New products from manufacturers at wholesale prices