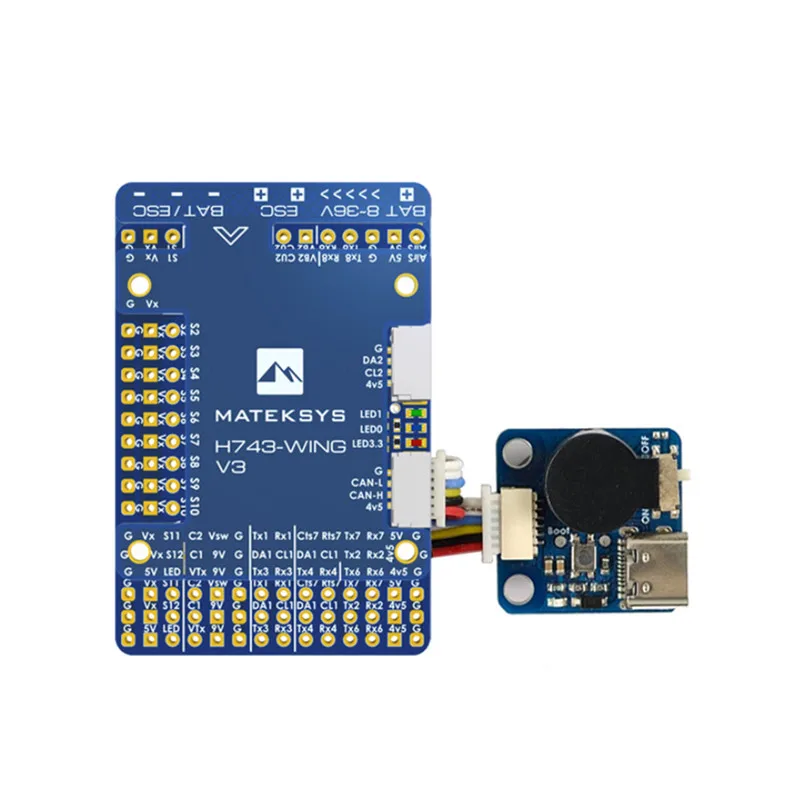


MATEK H743 WING V3 ArduPilot INAV 3 8S H743 Flight Controller FC 30.5X30.5mm for RC Airplane Multirotor Fixed Wing Drones
- Category: >>>
- Supplier: Shenzhen Fengfei Electronics Co. Ltd.
Share on (1601253795888):
Product Overview
Description
Product Description



Specification
Packing & Delivery
1x H743-WING
1x USB(Type-C)/Beep (Passive buzzer) Extender
1x 20cm JST-SH-6P to JST-SH-6P cable for USB extender.
2x 20cm JST-GH-4P to JST-GH-4P cable for CAN & I2C port
1x Rubycon ZLH 35V 470uF capacitor
Dupont 2.54 pins (Board is shipped unsoldered)
1x USB(Type-C)/Beep (Passive buzzer) Extender
1x 20cm JST-SH-6P to JST-SH-6P cable for USB extender.
2x 20cm JST-GH-4P to JST-GH-4P cable for CAN & I2C port
1x Rubycon ZLH 35V 470uF capacitor
Dupont 2.54 pins (Board is shipped unsoldered)
Company Profile
Shenzhen Feixiang Model Co, Ltd. Was established in 2003, We deal with various kinds of R/C hobbies and R/C toys. Such as R/C Multicopter, R/C Drone, R/C Airplane, Gas Airplane, R/C car, R/C boat, R/C Robot, RC accessories, etc.
We export to all over the world. Now we enjoy a very good credit in the overseas market. Our dealing brand contain most famous brand rc drone rc charger and lipoly battery brand, such as: DJI,Tarot, Hobbywing, DLE, Flysky, Frsky,Zhiyu, T-motor, SKYRC,ISDT,ACE etc.
We supply the most competitive products with lower price and higher quality. We do business based on a simple formula: Give our customers the product they want at a fair price, ship those.
Welcome to visit our www.lxrcmodel.com wholesale website.
We export to all over the world. Now we enjoy a very good credit in the overseas market. Our dealing brand contain most famous brand rc drone rc charger and lipoly battery brand, such as: DJI,Tarot, Hobbywing, DLE, Flysky, Frsky,Zhiyu, T-motor, SKYRC,ISDT,ACE etc.
We supply the most competitive products with lower price and higher quality. We do business based on a simple formula: Give our customers the product they want at a fair price, ship those.
Welcome to visit our www.lxrcmodel.com wholesale website.
FAQ
Q:How about your quality?
A:Our quality will be good,and the goods have been checked and tested one by one before shipping.
Q:How long for the delivery once we place order?
A:The lead time is declded the item you ordered and the quantity.
For normal order,the lead time is about in 5-7 days,
If big quantity or OEM,the lead time will be some days more.
Q:The price you are offering is with shipping costs included?
A:The price does not include the shipping cost.We offer several
shipping solutions,make sure customers choose the most economical one.
Q:Do you have After-Sales Service?
A:Of course,We have special department to do it,and if you have any technology
problem,our eingeer will give your answer.
A:Our quality will be good,and the goods have been checked and tested one by one before shipping.
Q:How long for the delivery once we place order?
A:The lead time is declded the item you ordered and the quantity.
For normal order,the lead time is about in 5-7 days,
If big quantity or OEM,the lead time will be some days more.
Q:The price you are offering is with shipping costs included?
A:The price does not include the shipping cost.We offer several
shipping solutions,make sure customers choose the most economical one.
Q:Do you have After-Sales Service?
A:Of course,We have special department to do it,and if you have any technology
problem,our eingeer will give your answer.
Semi-Automatic PET Bottle Blowing Machine Bottle Making Machine Bottle Moulding Machine
PET Bottle Making Machine is suitable for producing PET plastic containers and bottles in all shapes.
PET Bottle Making Machine is suitable for producing PET plastic containers and bottles in all shapes.
We Recommend






New Arrivals
New products from manufacturers at wholesale prices