Based on the 32-bit DSP platform developed by TI, provided with vector control technology and servo demodulation function internally and in combination with feedback from the encoder of closed loop motor, T60 stepper servo drive enables the stepper servo system to feature low noise, low heating, no loss of step and higher application speed, able to improve performance of the intelligent equipment system comprehensively.
— Signal level: 3.3-24V compatible; serial resistance not necessary for the application of PLC.
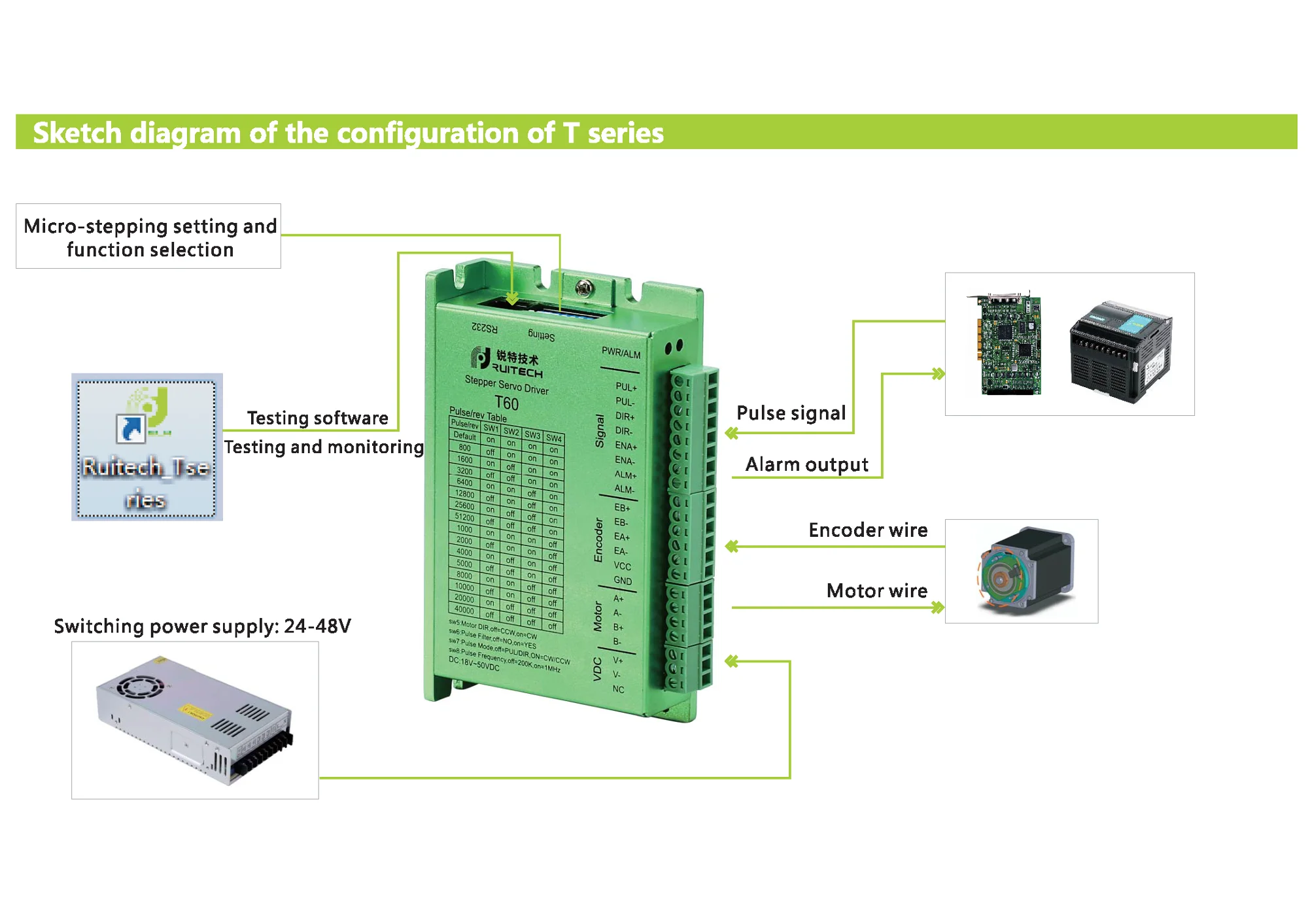
— Power voltage: 24-50V DC, and 36 or 48V recommended
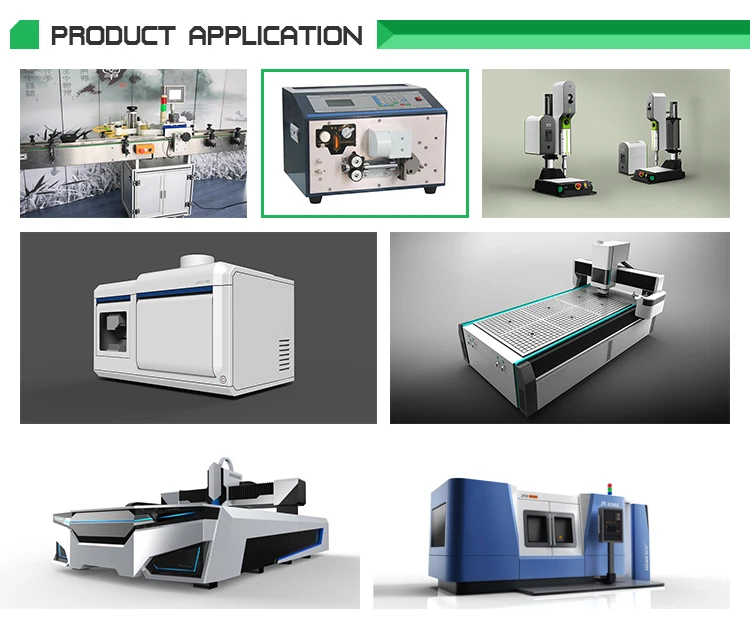
— Typical applications: Auto-screwdriving machine, servo dispenser, wire-stripping machine, labeling machine, medical detector, electronic assembly equipment etc.
Description of drive functions
Function
Description of operations
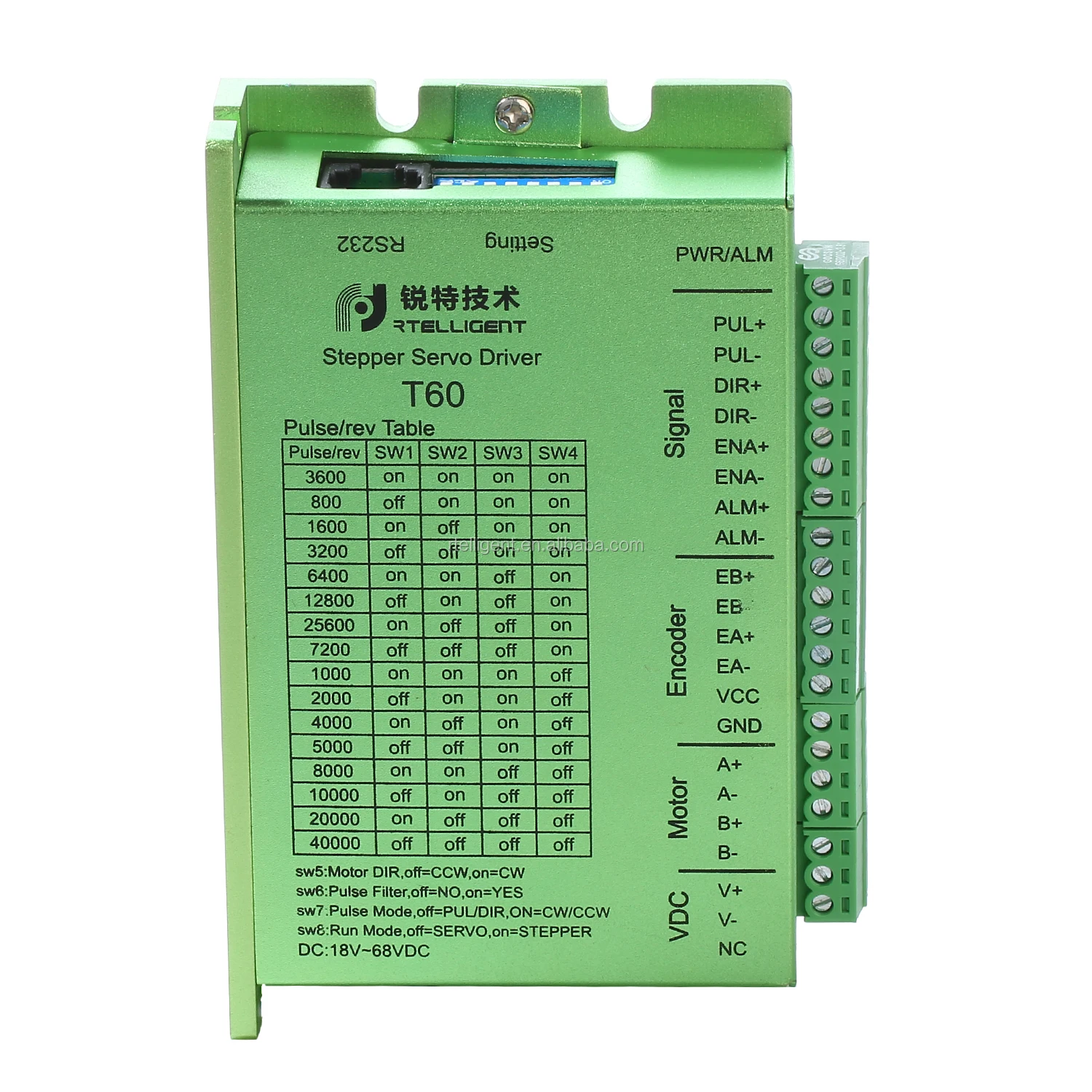
Setting of micro-stepping level number
SW1-SW4, the four DIP switches, are used for selection of the 16 micro-stepping levels in total. Please set the correct micro-stepping levels in reference to the description of drive panel; other micro-stepping levels can be modified via testing software after turning all SW1-SW4 on.
Setting of running direction
SW5 is used for selection of an initial running direction for the motor. The setting can become valid after the drive is powered off and restarted.
Selection of pulse smoothing
SW6 is used for selection of whether to enable the internal type S command smoothing function. On means that the function is enabled to make the input pulse signal of the drive smoother. The setting can become valid after the drive is powered off and restarted.
Pulse mode selection
SW7 is used for selection of the input pulse mode, with Off referring to the pulse & direction and on the double pulse. It can also be modified as the orthogonal pulse mode via the testing software. The setting can become valid after the drive is powered off and restarted.
Signal interface
PUL+ and PUL- are the positive and negative terminals of control pulse signal respectively; DIR+ and DIR- the positive and negative terminals of direction signal; ENA+ and ENA- the positive and negative terminals of enable signal; and ALM+ and ALM- the positive and negative terminals of alarm output signal.
Encoder interface
EB+ and EB- are B-direction signal interfaces of the encoder, EA+ and EA- A-direction signal interfaces of the encoder; and VCC and GND power interfaces of the encoder.
Motor interface
A+, A-, B+ and B- are winding interfaces of the stepper servo motor, which shall be connected correspondingly according to the identification colors on the motor and cannot be exchanged.
Power interface
V+ and V- are positive and negative terminals of the input DC power respectively, with NC indicating null.T60 operates within a voltage range of 24-50VDC and has a power of over 150W.
Nema 17 closed stepper motor: https://www.alibaba.com/product-detail/42A03EC-High-Quality-42mm-Closed-Loop_60744014878.html?spm=a2700.icbuShop.prewdfa4cf.5.1f2d7632BjVjwE
Nema 23 closed stepper motor: https://www.alibaba.com/product-detail/57A1EC-China-NEMA-23-Closed-Loop_60763967553.html?spm=a2747.manage.list.4.382071d23z1TyI