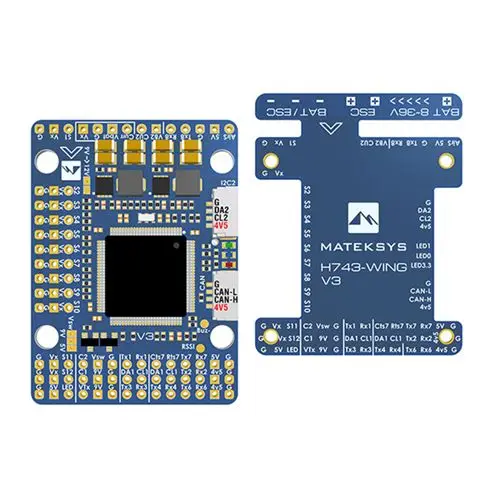
FC Specifications
* MCU: STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash
* IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
* Baro: Infineon DPS310 (I2C2)
* OSD: AT7456E (SPI2)
* Blackbox: MicroSD card slot (SDIO)
* 7x Uarts (1,2,3,4,6,7,8) with built-in inversion.
* 13x PWM outputs(including “LED” pad)
* 2x I2C
* 1x CAN
* 6x ADC (VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2)
* 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
* 1x SPI3 breakout
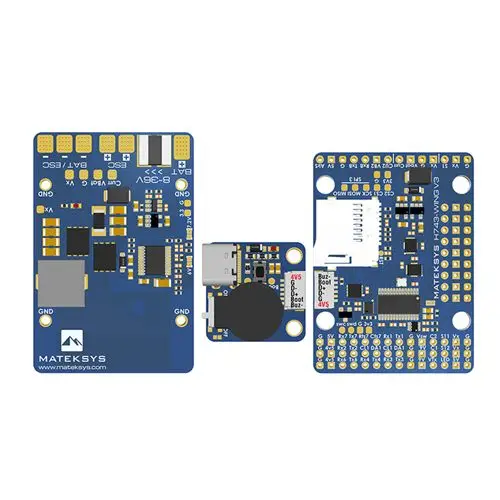
* USB/Beep Extender with Type-C(USB2.0)
* Dual Camera Inputs switch
* 5V/9V(12V) for Camera/VTX power switch
* High-precision Current Sense (90A continuous, 220A peak)
* Battery Voltage Sensor: 1K:10K (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
* ADC VB2 voltage divider: 1K:20K
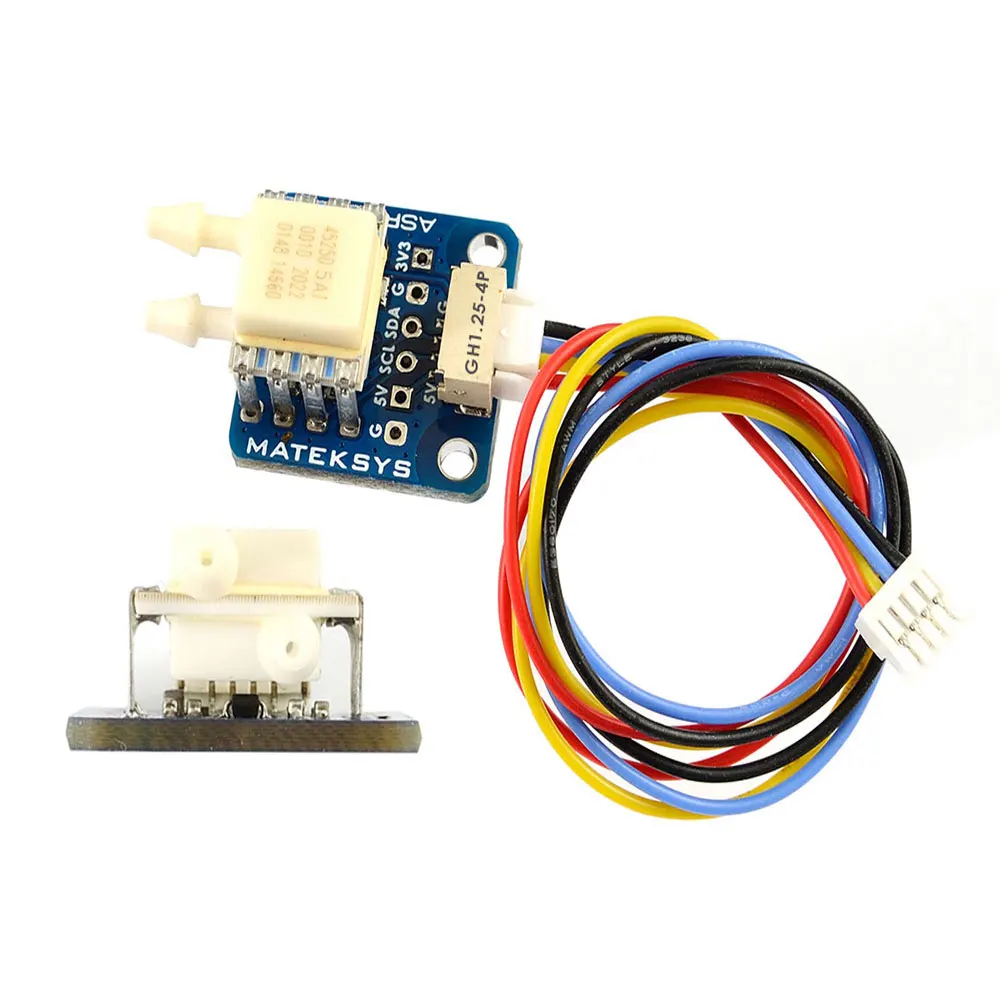
* ADC AirSpeed voltage divider: 20K:20K
* Static power 160mA@5V
FC Firmware
* ArduPilot(ChiBiOS): MATEKH743
* INAV: MATEKH743
PDB
* Input voltage range: 8~36V (3~8S LiPo) w/TVS protection
* 2x ESC power pads
* Current Senor: 220A, 3.3V ADC (Scale 150 in INAV, 66.7 A/V in ArduPilot)
* Sense resistor: 90A continuous, 220A peak.
BEC 5V output
* Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed
Output 5.15 +/- 0.1V DC
* Continuous current 2 Amps, 3A Peak
BEC 9V /12V output
* Designed for Video Transmitter, Camera, Gimbal ect.
* Continuous current 2 Amps, 3A Peak
* 12V option with Jumper pad
BEC Vx output
* Designed for Servos
* Voltage adjustable, 5V Default, 6V or 7.2V via jumper
* Continuous current 8 Amps, 10A Peak
BEC 3.3V output
* Linear Regulator
* Continuous current: 200mA
Physical
* Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
* Dimensions: 54 x 36 x 13 mm
* Weight: 30g with USB extender