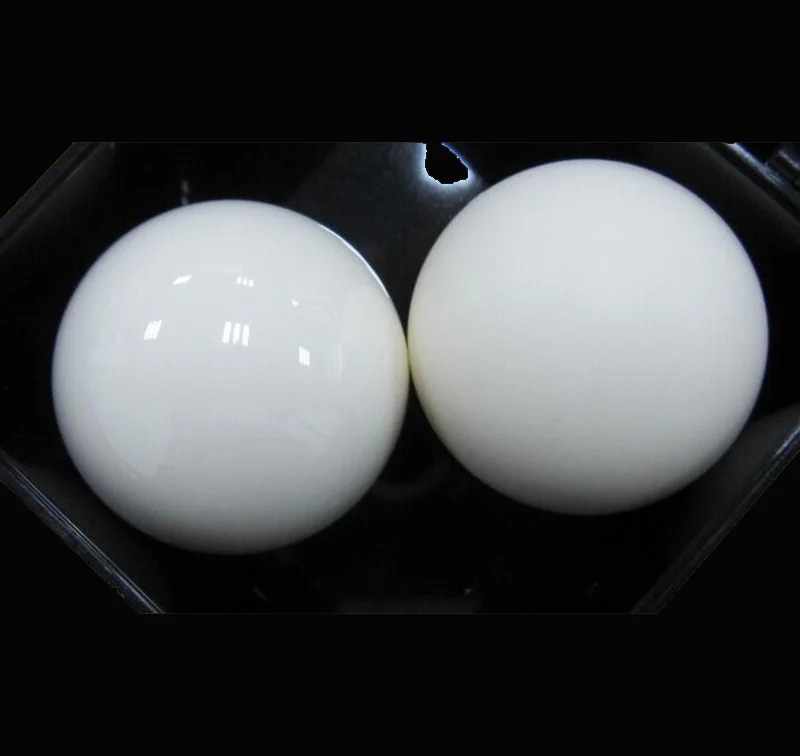
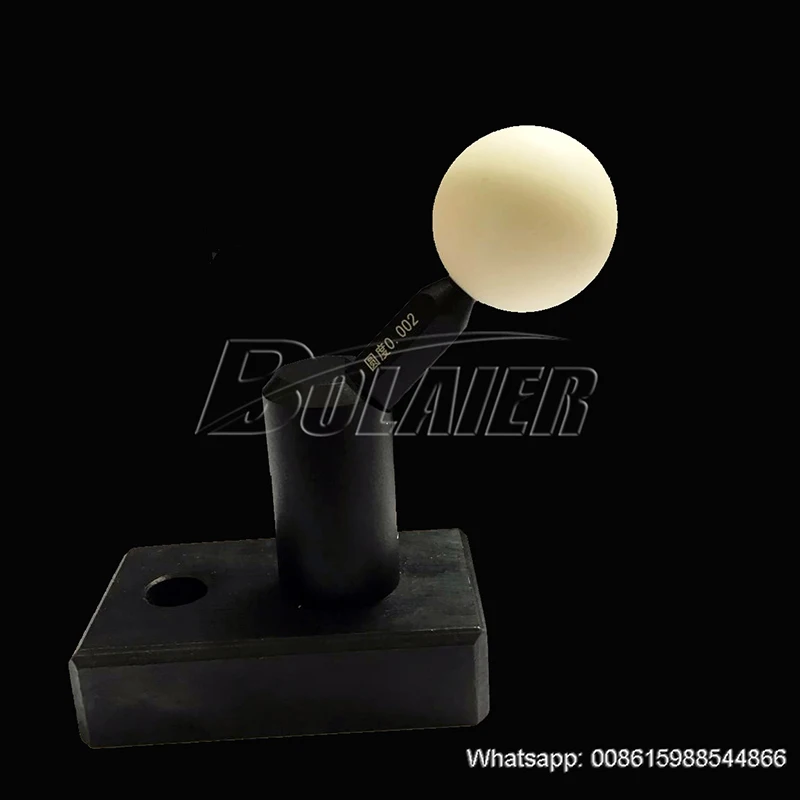


CMM ceramic calibration sphere, cmm reference sphere calibration
- Category: Instrument Parts & Accessories >>>
- Supplier: Shaanxi Bolaier Industry Co. Limited
Share on (62015470560):
Product Overview
Description
CMM ceramic calibration sphere, cmm calibration artifact cmm ball
Optical reference spheres 20mm 25mm 30mm 38mm 100mm diameter with roundness 2um or 1 um hole 3.5x6mm
Three dimensional measurement of complex geometry with Coordinate measuring machines (CMMs) requires multiple clamping and fixturing of measured object. In order to speed-up this process and to reduce the number of fixturing operations, a robotic arm can be used to manipulate the measured object. This paper describes measurement uncertainty analysis of an improved complex measurement system consisting of robotic arm and the coordinate measuring machine.




We Recommend



2m*2 Section Carbon Fiber GPS Rover Pole
US $68.68-$75.76


Open Clamp Bracket With Compass Cradles Used For 38-20mm Pole
US $105.00-$125.00
New Arrivals
New products from manufacturers at wholesale prices